
アマゾン

ESP-WROOM-02ピッチ変換済みモジュール《フル版》
ブランド: スイッチサイエンス(Switch Science)技適製品
参考
●Arduino Nanoをフライトコントローラーとしてのせる【https://deviceplus.jp/hi-tech/diy-arduino-drone/】
●WROOM-02とパソコンをつなげてみる【https://bmicom.dmsk.com/wroom-02/circuit-diagram】
●sucher(ズーハー)【https://sucher.net/esp-wroom-02/】
ESP-WROOM-02 仕様
(スイッチサイエンス資料)
電源電圧 3.0-3.6V
消費電流 平均 80mA(※別資料:通常80mAで最大360mA)
フラッシュ 2MB
対応WiFiプロトコル 802.11b/g/n (2.4GHz)
18mm×20mm×3mm
Wi-Fi mode station/softAP/SoftAP+station
セキュリティ WPA/WPA2
暗号化 WEP/TKIP/AES
回路図

モーター回転
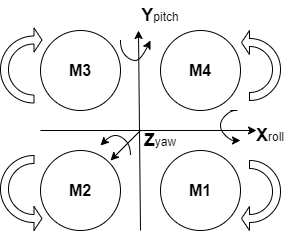
0615モーター
■CWモーター(時計回転)
赤⊕ 青⊖
M1 M3
■CCWモーター(反時計回転)
白⊕ 黒⊖
M2 M4
三端子レギュレーター

ドロップアウト電圧:0.4V

安定化電源3.7Vを三端子レギュレーターに入力
モーター無回転
RemoteXY WIFI接続
安定化電源電流 0.07A
三端子レギュレーターアウト電圧 3.31V

安定化電源3.7Vを三端子レギュレーターに入力
モーター最大回転
RemoteXY WIFI接続
安定化電源電源 1.48A
三端子レギュレーターアウト電圧 3.03V
LIPOバッテリーによる浮上テスト

ドローン用LIPOバッテリー3.7V(250mA)を使って、RemoteXY操作により浮上確認できました。
RemoteXYアプリ
●同ブログ関連記事:【RemoteXY使い方】
【Properties】【Configuration】設定変更
[Connection]WiFi access point
[Board]ESP8266 based board
[Module]WiFi on chip
【Apply】実行
【Slider】をスマホ画面に貼付け、大きさ・色等を変更
(コントロール配置は5個以内)
【Get source code】実行
コードをArduino IDE エディタ画面に貼付てスケッチを行う。
.png)
プログラム書込み

パソコン Arduino IDE からFT232RL USBシリアル変換を接続してESP-WROOM-02にプログラム書込みを行います。
■FT232RL
ショートピン➨3.3V側
■ESP8266
IO0➨GNDにショート(書込み)
Arduino IDE
.png)
プログラム
//////////////////////////////////////////////
// RemoteXY include library //
//////////////////////////////////////////////
// you can enable debug logging to Serial at 115200
//#define REMOTEXY__DEBUGLOG
// RemoteXY select connection mode and include library
#define REMOTEXY_MODE__ESP8266WIFI_LIB_POINT
#include <ESP8266WiFi.h>
#include <RemoteXY.h>
// RemoteXY connection settings
#define REMOTEXY_WIFI_SSID "RemoteXY"
#define REMOTEXY_WIFI_PASSWORD "12345678"
#define REMOTEXY_SERVER_PORT 6377
// RemoteXY configurate
#pragma pack(push, 1)
uint8_t RemoteXY_CONF[] = // 42 bytes
{ 255,4,0,0,0,35,0,16,124,1,4,128,4,13,54,12,190,8,4,128,
4,30,54,12,190,8,4,128,4,46,54,12,190,8,4,128,4,64,54,12,
190,8 };
// this structure defines all the variables and events of your control interface
struct {
// input variables
int8_t slider_1; // =0..100 slider position
int8_t slider_2; // =0..100 slider position
int8_t slider_3; // =0..100 slider position
int8_t slider_4; // =0..100 slider position
// other variable
uint8_t connect_flag; // =1 if wire connected, else =0
} RemoteXY;
#pragma pack(pop)
/////////////////////////////////////////////
// END RemoteXY include //
/////////////////////////////////////////////
#define M1 12
#define M2 13
#define M3 14
#define M4 15
#define PWN_FREQ 1000 // PWM frequency: 1000Hz(1kHz)
#define PWN_RANGE 100 // PWN range: 100
void setup()
{
RemoteXY_Init ();
pinMode(M1,OUTPUT);
pinMode(M2,OUTPUT);
pinMode(M3,OUTPUT);
pinMode(M4,OUTPUT);
analogWriteFreq(PWN_FREQ);
analogWriteRange(PWN_RANGE);
}
void loop()
{
RemoteXY_Handler ();
delay(100);
int S1 = RemoteXY.slider_1;
int S2 = RemoteXY.slider_2;
int S3 = RemoteXY.slider_3;
int S4 = RemoteXY.slider_4;
analogWrite(M1, S1);
analogWrite(M2, S2);
analogWrite(M3, S3);
analogWrite(M4, S4);
}




0 件のコメント:
コメントを投稿