 |
| 総重量 26.61g |
MadgwickFilterによる姿勢制御(PID制御無し)を行いましたが、RemoteXY操作からスロットルを上げ過ぎると反転、少し浮く状態では水平方向に移動します。次回、MadgwickFilterによるPID制御をテストします。
同ブログ関連記事:【ドローン製作⑥ ESP8266 MPU6050 MadgwickFilter】
動画
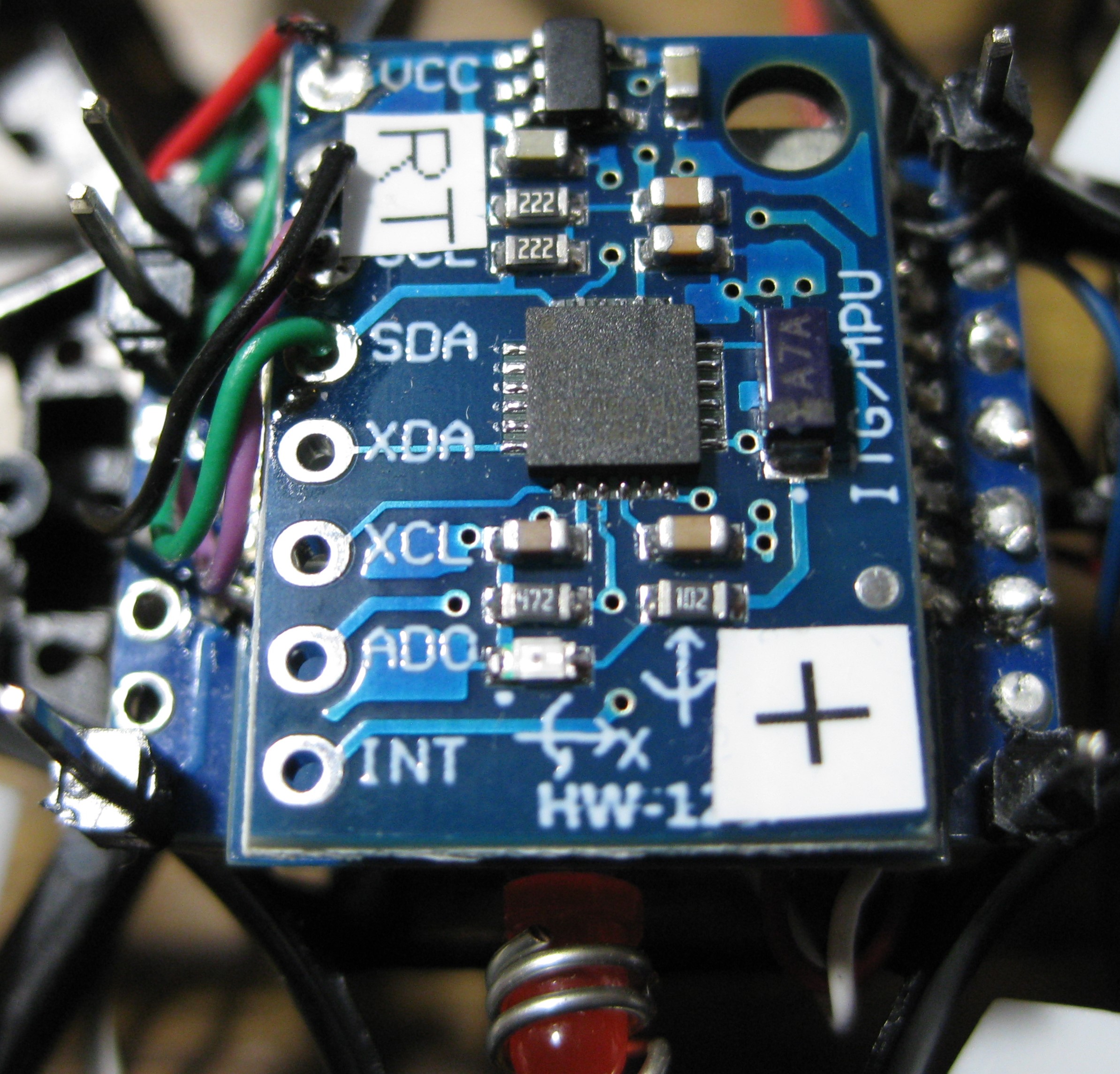
基板配線

ESP8266コントローラー

ESP8266のシールド板にMPU6050を両面テープで貼付
同ブログ関連記事:【ドローン製作③ ESP8266コントローラ 組立】
MPU6050基板搭載
MPU-6050 使用 3軸ジャイロスコープ・3軸加速度センサー モジュール
アマゾン【https://www.amazon.co.jp/gp/product/B008BOPN40/ref=ppx_yo_dt_b_asin_image_o06_s00?ie=UTF8&psc=1】
モータ位置
 ドローン用LIPO バッテリー3.7V(250mA)満充電(4.2V)を直接ESP8266接続して使用しました。
ドローン用LIPO バッテリー3.7V(250mA)満充電(4.2V)を直接ESP8266接続して使用しました。ESP8266規格を超える使用
・電源電圧min.:2.7V
・電源電圧max.:3.6V
回路図

RemoteXYアプリ
●同ブログ関連記事:【RemoteXY使い方】
【Properties】【Configuration】設定変更
[Connection]WiFi access point
[Board]ESP8266 based board
[Module]WiFi on chip
【Apply】実行
【Slider・Button】をスマホ画面に貼付け、大きさ・色等を変更
(コントロール配置は5個以内)
【Get source code】実行
コードをArduino IDE エディタ画面に貼付てスケッチを行う。
.png) |
| ”S1”~”S4”表示されません |
CAL:キャリブレーション(ROLL・PITCH値を0にする)
S1:ROLL
S2:PITCH
S3:YAW
S4:スロットル
プログラム書込み

パソコンUSBポートのFT232RL USBシリアル変換とESP8266のTXD RXD VCC GND接続して、プログラム書込みを行います。
●FT232RL
ショートピン➨3.3V側
●ESP8266
IO0➨GNDにショート(書込み)
Arduino IDE
.png)
プログラム
//////////////////////////////////////////////
// RemoteXY include library //
//////////////////////////////////////////////
// you can enable debug logging to Serial at 115200
//#define REMOTEXY__DEBUGLOG
// RemoteXY select connection mode and include library
#define REMOTEXY_MODE__ESP8266WIFI_LIB_POINT
#include <ESP8266WiFi.h>
#include <RemoteXY.h>
// RemoteXY connection settings
#define REMOTEXY_WIFI_SSID "RemoteXY"
#define REMOTEXY_WIFI_PASSWORD "12345678"
#define REMOTEXY_SERVER_PORT 6377
// RemoteXY configurate
#pragma pack(push, 1)
uint8_t RemoteXY_CONF[] = // 63 bytes
{ 255,5,0,0,0,56,0,17,0,0,0,195,1,126,200,1,1,5,0,4,
2,112,122,20,128,204,26,4,2,134,122,20,128,204,26,4,2,156,122,20,
128,204,26,4,100,252,18,114,0,134,26,1,25,34,39,38,1,234,31,67,
65,76,0 };
// this structure defines all the variables and events of your control interface
struct {
// input variables
int8_t slider_1; // =0..100 slider position
int8_t slider_2; // =0..100 slider position
int8_t slider_3; // =0..100 slider position
int8_t slider_4; // =0..100 slider position
uint8_t button_1; // =1 if button pressed, else =0
// other variable
uint8_t connect_flag; // =1 if wire connected, else =0
} RemoteXY;
#pragma pack(pop)
/////////////////////////////////////////////
// END RemoteXY include //
/////////////////////////////////////////////
#include "MPU6050.h"
MPU6050 accelgyro;
#include <MadgwickAHRS.h>
Madgwick MadgwickFilter;
int16_t ax, ay, az;//加速度 int16_tは2バイトの符号付き整数
int16_t gx, gy, gz;//角速度 同上
float ROLL, PITCH, YAW;//x,y,z軸の角度
float R,P,Y;//キャリブレーション変数
#define M1 12
#define M2 13
#define M3 14
#define M4 15
#define PWN_FREQ 1000 // PWM frequency: 1000Hz(1kHz)
#define PWN_RANGE 100 // PWN range: 100
void setup()
{
RemoteXY_Init ();
pinMode(M1,OUTPUT);
pinMode(M2,OUTPUT);
pinMode(M3,OUTPUT);
pinMode(M4,OUTPUT);
Wire.begin();
Serial.begin(115200);
accelgyro.initialize();//I2Cデバイスの初期化
delay(300);
MadgwickFilter.begin(100);//フィルタのサンプリングを100Hzで
analogWriteFreq(PWN_FREQ);
analogWriteRange(PWN_RANGE);
R = 0;
P = 0;
Y = 0;
//シリアルプロッタ文字表示(ESP02文字表示しない)
Serial.print("ROLL"); Serial.print(",");
Serial.print("PITCH"); Serial.print(",");
Serial.println("YAW"); Serial.print(",");
delay(100);
}
void loop()
{
RemoteXY_Handler ();
int S1 = RemoteXY.slider_1;
int S2 = RemoteXY.slider_2;
int S3 = RemoteXY.slider_3;
int S4 = RemoteXY.slider_4;
accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
MadgwickFilter.updateIMU(gx / 131.0, gy / 131.0, gz / 131.0, ax / 16384.0, ay / 16384.0, az / 16384.0);
ROLL = MadgwickFilter.getRoll();
PITCH = MadgwickFilter.getPitch();
YAW = MadgwickFilter.getYaw();
ROLL = ROLL / 90; //傾き-90~90度 → -1~1
PITCH = PITCH / 90; //傾き-90~90度 → -1~1
ROLL = S1*0.2*ROLL;
PITCH =S2*0.2*PITCH;
YAW = YAW-180;
YAW = YAW / 90; //傾き-90~90度 → -1~1
YAW = S3*0.2*YAW;
if (RemoteXY.button_1 == 1){ //"CALボタン"
R = ROLL;
P = PITCH;
Y = YAW;
}
ROLL = ROLL - R; //キャリブレーション
PITCH = PITCH - P;
YAW = YAW - Y;
//シリアルモニター
//Serial.print("ROLL:");Serial.print(ROLL); Serial.print("| ");
//Serial.print("PITCH:");Serial.print(PITCH); Serial.print("| ");
//Serial.print("YAW");Serial.print(YAW);
//Serial.print("\n");
//シリアルプロッタ
Serial.print(ROLL); Serial.print(",");
Serial.print(PITCH); Serial.print(",");
Serial.println(YAW);
//モーター制御
analogWrite(M1, (S4*0.8+ROLL+PITCH-YAW)*1.0);
analogWrite(M2, (S4*0.8+ROLL-PITCH+YAW)*1.0);
analogWrite(M3, (S4*0.8-ROLL-PITCH-YAW)*1.0);
analogWrite(M4, (S4*0.8-ROLL+PITCH+YAW)*1.0);
delay(5);
}

.JPG)


0 件のコメント:
コメントを投稿