
動画
回路図

PS4コントローラー(Bluetooth)
 |
| PSボタンを押して電源オン(接続) |
モード1
PS4.LStickY() ↕ 前進/後進 PS4.LStickX() ↔ 左移動/右移動
PS4.RStickY() ↕ 上昇/下降 PS4.RStickX() ↔ 左旋回/右旋回
PS4.R1() モータ起動 PS4.R2() モータ停止
PS4.L1() キャリブレーション
PS4-esp32-master libraries入手
.png)
【Code】【Download ZIP】
【PS4-esp32-master】圧縮ファイルを展開
【PS4-esp32-master】フォルダを任意のArduino librariesに貼付け
MACアドレスの確認
.png)
【LO4D.com UK】ダウンロード
【SixaxisPairToolSetup-0.3.1】任意ファイルにインストール
PS4コントローラーとパソコンをUSB接続
.png)
【SixaxisPairTool】実行する。
Current Master
【XX:XX:XX:XX:XX:XX】MACアドレス
↓
ESP32 プログラム
PS4.begin("XX:XX:XX:XX:XX:XX")
MACアドレスを入力
ESP32を2台登録すると1台目が接続できなくなる→解除方法
.png)
ESP32
【スケッチ例】【BluetoothSerial】
【bt_remove_paired_devices】
bt_remove_paired_devices
.png)
接続できないESP32に同プログラム書込→
プログラムを戻すと接続出来ました。
(ESP32の登録デバイスを解除)
ESP32-WROOM-32E

●Wi-Fiモジュール ESP32-WROOM-32E 16MB
Bluetooth V4.2
ピッチ変換基板

基板ハンダ

丸ピンヘッダ ・ソケット

●丸ピンヘッダ ・ソケット2.54mmピッチ
ESP32・BMX055とドライブ基板接続
接触が気になるので、丸ピンヘッダの表面にハンダを流しました。
丸ピンヘッダハンダ

SI2302A

●MOSFETドライバー
ADP3338

●表面実装低損失レギュレーターADP3338AKCZ-3.3
ドローンフレーム・モータ

●フレーム BETAFPV 65S 65mm Micro Whoop Frame for 7x16mm Motors Version 4【https://item.rakuten.co.jp/airstage/10015759/】

●BETAFPV プロペラ HQ 31mm 3-Blade Propellers (0.8mm Shaft 4PCS) 【クリアグ
レー】(BETA 65S 2022Ver.などに)
●ドローンアクセサリー 4 ペア 31mm 0.8mm 1.0mm 穴 3 ブレード プロペラ PC 小道具 CW CCWドローンアクセサリー 4 ペア 【https://www.amazon.co.jp/gp/product/B0BGM633K5/ref=ox_sc_act_title_1?smid=A28LWE3HRWLAWN&th=1】
基板

●角型ランド両面スルーホールガラスコンポジット・ユニバーサル基板 Cタイプ(72×47mm)
【https://akizukidenshi.com/catalog/g/g109747/】
【https://akizukidenshi.com/catalog/g/g109747/】
フレームに合わせて切断
9軸センサBMX055

●9軸(加速度3軸+ジャイロ3軸+磁気コンパス3軸)センサ BMX055にレベル変換回路

●I2Cアドレス
加速度0x19 ジャイロ0x69 磁気0x13
JP1オープン JP2オープン JP3オープン ●プルアップ接続
JP4ショート JP5ショート
●電源3.3V 信号3.3V
JP6オープン JP7ショート JP8オープン


基板ハンダ


LED取付

抵抗内臓LEDをIO12・ IO27穴にハンダ
プログラム制御による点灯
IO12 LED ⊕IO27 LED ⊖
秋月電子通商
【https://akizukidenshi.com/catalog/g/g116692/】
 変換コネクタ製作
変換コネクタ製作


CH9102搭載 ESP32 ダウンローダキット
 |
 |
CP2104/CH9102搭載 ESP32 ダウンローダキット【https://akizukidenshi.com/catalog/g/g117240/】
ドライバーインストール
●ESP32 Downloader Kitダウンロードサイト【https://docs.m5stack.com/en/accessory/esp32_downloader_kit】
●【CH9102_VCP_SER_Windows】選択してドライバーをダウンロードする
●ドライバーをインストールする
操作
プッシュスイッチ操作無しでプログラム書込
み・実行を自動で行ってくれる。
プログラム書込み

ピンソケットと丸ピンヘッダをはんだし、チューブを熱収縮する(ピンヘッダの表面にハンダを流す)


モータ位置
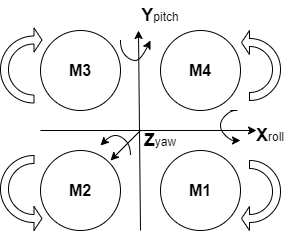
0716モーター
■CWモーター(時計回転)
赤⊕ 黒⊖
M1 M3
■CCWモーター(反時計回転)
白⊕ 黒⊖
M2 M4
プログラム Arduino IDE【ボード:ESP32 Dev Module】
//ESP32ボードマネージャ バージョン1.0.6
#include <PS4Controller.h>
#include<Wire.h>
#include <MadgwickAHRS.h>
Madgwick MadgwickFilter;
float ROLL_P, ROLL_I, ROLL_D, ROLL_M;
float PITCH_P, PITCH_I, PITCH_D, PITCH_M;
float YAW_P, YAW_I, YAW_D, YAW_M;
float R, P, Y;
float Kp, Kd, Ki;
int CAL, Auto, throttle;
int JRX, JRY, JLX, JLY; //Joystick
#define M1 18
#define M2 19
#define M3 23
#define M4 32
// BMX055
#define Addr_Accl 0x19 // 加速度センサのI2Cアドレス(JP1,JP2,JP3 = Openの時)
#define Addr_Gyro 0x69 // ジャイロセンサのI2Cアドレス(JP1,JP2,JP3 = Openの時)
#define Addr_Mag 0x13 // 磁気センサのI2Cアドレス(JP1,JP2,JP3 = Openの時)
// センサーの値を保存するグローバル変数
float ax = 0.00;//加速度
float ay = 0.00;
float az = 0.00;
float gx = 0.00;//角速度
float gy = 0.00;
float gz = 0.00;
int mx = 0;
int my = 0;
int mz = 0;
float ROLL = 0.00;
float PITCH = 0.00;
float YAW = 0.00;
int m1, m2, m3, m4;
void BMX055_Init() //BMX055の初期化
{
Wire.beginTransmission(Addr_Accl);
Wire.write(0x0F); // Select PMU_Range register
Wire.write(0x03); // Range = +/- 2g
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Accl);
Wire.write(0x10); // Select PMU_BW register
Wire.write(0x08); // Bandwidth = 7.81 Hz
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Accl);
Wire.write(0x11); // Select PMU_LPW register
Wire.write(0x00); // Normal mode, Sleep duration = 0.5ms
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Gyro);
Wire.write(0x0F); // Select Range register
Wire.write(0x04); // Full scale = +/- 125 degree/s
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Gyro);
Wire.write(0x10); // Select Bandwidth register
Wire.write(0x07); // ODR = 100 Hz
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Gyro);
Wire.write(0x11); // Select LPM1 register
Wire.write(0x00); // Normal mode, Sleep duration = 2ms
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4B); // Select Mag register
Wire.write(0x83); // Soft reset
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4B); // Select Mag register
Wire.write(0x01); // Soft reset
Wire.endTransmission();
delay(100);
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4C); // Select Mag register
Wire.write(0x00); // Normal Mode, ODR = 10 Hz 0x00 //100Hz 0x07
Wire.endTransmission();
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x4E); // Select Mag register
Wire.write(0x84); // X, Y, Z-is enabled
Wire.endTransmission();
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x51); // Select Mag register
Wire.write(0x04); // No. of Repetitions for X-Y is = 9
Wire.endTransmission();
//------------------------------------------------------------//
Wire.beginTransmission(Addr_Mag);
Wire.write(0x52); // Select Mag register
Wire.write(0x16); // No. of Repetitions for Z-Axis = 15
Wire.endTransmission();
}
void BMX055_All() //BMX055から全データとMadgwickフィルタの結果を取得する
{
unsigned int data[8];
//加速度データを取得する
for (int i = 0; i < 6; i++)
{
Wire.beginTransmission(Addr_Accl);
Wire.write((2 + i));// Select data register
Wire.endTransmission();
Wire.requestFrom(Addr_Accl, 1);// Request 1 byte of data
// Read 6 bytes of data
// ax lsb, ax msb, ay lsb, ay msb, az lsb, az msb
if (Wire.available() == 1)
data[i] = Wire.read();
}
// Convert the data to 12-bits
ax = ((data[1] * 256) + (data[0] & 0xF0)) / 16;
if (ax > 2047) ax -= 4096;
ay = ((data[3] * 256) + (data[2] & 0xF0)) / 16;
if (ay > 2047) ay -= 4096;
az = ((data[5] * 256) + (data[4] & 0xF0)) / 16;
if (az > 2047) az -= 4096;
ax = ax * 0.0098; // range = +/-2g
ay = ay * 0.0098; // range = +/-2g
az = az * 0.0098; // range = +/-2g
// 上記の乗数は秋月のマニュアル通りですが、誤値とのことです。
// 正しくは、mg換算で0.98、G換算で0.00098
// とのことです。
//ジャイロデータを取得する
for (int i = 0; i < 6; i++)
{
Wire.beginTransmission(Addr_Gyro);
Wire.write((2 + i)); // Select data register
Wire.endTransmission();
Wire.requestFrom(Addr_Gyro, 1); // Request 1 byte of data
if (Wire.available() == 1)
data[i] = Wire.read();
}
// Convert the data
gx = (data[1] * 256) + data[0];
if (gx > 32767) gx -= 65536;
gy = (data[3] * 256) + data[2];
if (gy > 32767) gy -= 65536;
gz = (data[5] * 256) + data[4];
if (gz > 32767) gz -= 65536;
gx = gx * 0.0038; // Full scale = +/- 125 degree/s
gy = gy * 0.0038; // Full scale = +/- 125 degree/s
gz = gz * 0.0038; // Full scale = +/- 125 degree/s
//コンパスデータを取得する
for (int i = 0; i < 8; i++)
{
Wire.beginTransmission(Addr_Mag);
Wire.write((0x42 + i)); // Select data register
Wire.endTransmission();
Wire.requestFrom(Addr_Mag, 1); // Request 1 byte of data
// Read 6 bytes of data
// mx lsb, mx msb, my lsb, my msb, mz lsb, mz msb
if (Wire.available() == 1)
data[i] = Wire.read();
}
// Convert the data
mx = ((data[1] << 5) | (data[0] >> 3));
if (mx > 4095) mx -= 8192;
my = ((data[3] << 5) | (data[2] >> 3));
if (my > 4095) my -= 8192;
mz = ((data[5] << 7) | (data[4] >> 1));
if (mz > 16383) mz -= 32768;
}
void setup()
{
pinMode(12, OUTPUT); //LED +
digitalWrite(12, HIGH);
pinMode(27, OUTPUT);
digitalWrite(27, LOW); //LED -
PS4.begin("XX:XX:XX:XX:XX:XX");
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
pinMode(M3, OUTPUT);
pinMode(M4, OUTPUT);
ledcSetup(1, 1000, 8); // モータ 0CH 490Hz 8bit=0-255(PWM)
ledcSetup(2, 1000, 8);
ledcSetup(3, 1000, 8);
ledcSetup(4, 1000, 8);
ledcAttachPin(M1, 1); // モータ CH
ledcAttachPin(M2, 2);
ledcAttachPin(M3, 3);
ledcAttachPin(M4, 4);
Wire.begin();
Serial.begin(115200);
BMX055_Init(); //BMX055の初期化
delay(300);
MadgwickFilter.begin(100);//フィルタのサンプリングを100Hzで
R = 0;
P = 0;
Y = 0;
Kp = 0;
Ki = 0;
Kd = 0;
}
void loop()
{
if (PS4.isConnected()) {
if (PS4.R1()){ //モータ起動
Auto = 1;
}
if (PS4.R2()){ //モータ停止
Auto = 0;
}
if (PS4.L1()){ //キャリブレーション
CAL = 1;
}
if (PS4.L2()){
}
if (PS4.LStickX()) {
int LX = PS4.LStickX(); //左移動/右移動
JLX = map(LX, -128, 128, -255, 255);
}
if (PS4.LStickY()) {
int LY = PS4.LStickY(); //前進/後進
JLY = map(LY, -128, 128, -255, 255);
}
if (PS4.RStickX()) {
int RX = PS4.RStickX(); //左旋回/右旋回
JRX = map(RX, -128, 128, -255, 255);
}
if (PS4.RStickY()) {
int RY = PS4.RStickY(); //上昇/下降
JRY = map(RY, -127, 128, -255, 255);
}
}
BMX055_All();//BMX055から全データ
MadgwickFilter.update(gx, gy, gz, ax, ay, az, mx, my, mz);
ROLL = MadgwickFilter.getRoll();
PITCH = MadgwickFilter.getPitch();
YAW = MadgwickFilter.getYaw();
YAW = YAW - 90;
if (CAL == 1) { //"CALボタン"
R = ROLL;
P = PITCH;
Y = YAW;
ROLL_M = 0;
PITCH_M = 0;
YAW_M = 0;
CAL = 0;
}
ROLL = ROLL - R; //キャリブレーション
PITCH = PITCH - P;
YAW = YAW - Y;
// PID制御
ROLL_P = ROLL / 90; // P成分:傾き-90~90度 → -1~1
ROLL_I += ROLL_P; // I成分:傾きの積算。
if (10 < abs(ROLL_I)) ROLL_I = 0; //上限設定
ROLL_D = gx / 125; // D成分:角速度-125~125dps → -1~1
ROLL_M = ROLL_P * Kp +
ROLL_I * Ki +
ROLL_D * Kd;
PITCH_P = PITCH / 90; // P成分:傾き-90~90度 → -1~1
PITCH_I += PITCH_P; // I成分:傾きの積算。
if (10 < abs(PITCH_I)) PITCH_I = 0; //上限設定
PITCH_D = gy / 125; // D成分:角速度-125~125dps → -1~1
PITCH_M = PITCH_P * Kp +
PITCH_I * Ki +
PITCH_D * Kd;
YAW_P = YAW / 90; // P成分:傾き-90~90度 → -1~1
YAW_I += YAW_P; // I成分:傾きの積算。
if (10 < abs(YAW_I)) YAW_I = 0; //上限設定
YAW_D = gz / 125; // D成分:角速度-125~125dps → -1~1
YAW_M = YAW_P * Kp +
YAW_I * Ki +
YAW_D * Kd;
YAW_M = YAW_M + JRX * 0.05;
ROLL_M = ROLL_M + JLY * 0.05;
PITCH_M = PITCH_M - JLX * 0.05;
//自動浮上
if(Auto == 1 ){
//定数
Kp = 40;
Ki = 0.1;
Kd = 10;
throttle = (JRY + 255)/2 * 0.7;
}else{
throttle = 0;
ROLL_M = 0;
PITCH_M = 0;
YAW_M = 0;
}
// シリアルモニタ
//Serial.print("Kp:");Serial.print(Kp); Serial.print("| ");
//Serial.print("Ki:");Serial.print(Ki); Serial.print("| ");
//Serial.print("Kd:");Serial.print(Kd); Serial.print("| ");
//Serial.print("gx:");Serial.print(gx); Serial.print("| ");
//Serial.print("gy:");Serial.print(gy); Serial.print("| ");
//Serial.print("gz:");Serial.print(gz); Serial.print("| ");
//Serial.print("ROLL:");Serial.print(ROLL); Serial.print("| ");
//Serial.print("PITCH:");Serial.print(PITCH); Serial.print("| ");
//Serial.print("YAW:");Serial.print(YAW); Serial.print("| ");
//Serial.print("ROLL_P:");Serial.print(ROLL_P); Serial.print("| ");
//Serial.print("ROLL_I:");Serial.print(ROLL_I); Serial.print("| ");
//Serial.print("ROLL_D:");Serial.print(ROLL_D); Serial.print("| ");
//Serial.print("ROLL_M:");Serial.print(ROLL_M); Serial.print("| ");
//Serial.print("PITCH_P:");Serial.print(PITCH_P); Serial.print("| ");
//Serial.print("PITCH_I:");Serial.print(PITCH_I); Serial.print("| ");
//Serial.print("PITCH_D:");Serial.print(PITCH_D); Serial.print("| ");
//Serial.print("PITCH_M:");Serial.print(PITCH_M); Serial.print("| ");
//Serial.print("YAW_P:");Serial.print(YAW_P); Serial.print("| ");
//Serial.print("YAW_I:");Serial.print(YAW_I); Serial.print("| ");
//Serial.print("YAW_D:");Serial.print(YAW_D); Serial.print("| ");
//Serial.print("YAW_M:");Serial.print(YAW_M); Serial.print("| ");
//Serial.print("\n");
//シリアルプロッタ
//Serial.print(gx); Serial.print(",");
//Serial.print(gy); Serial.print(",");
//Serial.print(gz); Serial.print(",");
Serial.print(ROLL); Serial.print(",");
Serial.print(ROLL_P); Serial.print(",");
Serial.print(ROLL_I); Serial.print(",");
Serial.print(ROLL_D); Serial.print(",");
Serial.print(ROLL_M); Serial.print(",");
//Serial.print(PITCH); Serial.print(",");
//Serial.print(PITCH_P); Serial.print(",");
//Serial.print(PITCH_I); Serial.print(",");
//Serial.print(PITCH_D); Serial.print(",");
//Serial.print(PITCH_M); Serial.print(",");
//Serial.print(YAW); Serial.print(",");
//Serial.print(YAW_P); Serial.print(",");
//Serial.print(YAW_I); Serial.print(",");
//Serial.print(YAW_D); Serial.print(",");
//Serial.print(YAW_M); Serial.print(",");
Serial.print("\n");
//モータ暴走
//ledcWrite(1,(throttle + ROLL_M + PITCH_M - YAW_M)); //M1
//ledcWrite(2,(throttle + ROLL_M - PITCH_M + YAW_M)); //M2
//ledcWrite(3,(throttle - ROLL_M - PITCH_M - YAW_M)); //M3
//ledcWrite(4,(throttle - ROLL_M + PITCH_M + YAW_M)); //M4
//pwm 0-255の範囲
int M1pwm = constrain((throttle + ROLL_M + PITCH_M - YAW_M),0,255);
int M2pwm = constrain((throttle + ROLL_M - PITCH_M + YAW_M),0,255);
int M3pwm = constrain((throttle - ROLL_M - PITCH_M - YAW_M),0,255);
int M4pwm = constrain((throttle - ROLL_M + PITCH_M + YAW_M),0,255);
ledcWrite(1,M1pwm); //M1
ledcWrite(2,M2pwm); //M2
ledcWrite(3,M3pwm); //M3
ledcWrite(4,M4pwm); //M4
delay(5);
}




0 件のコメント:
コメントを投稿